
Brno Mars Rover
Building autonomous systems for Mars exploration
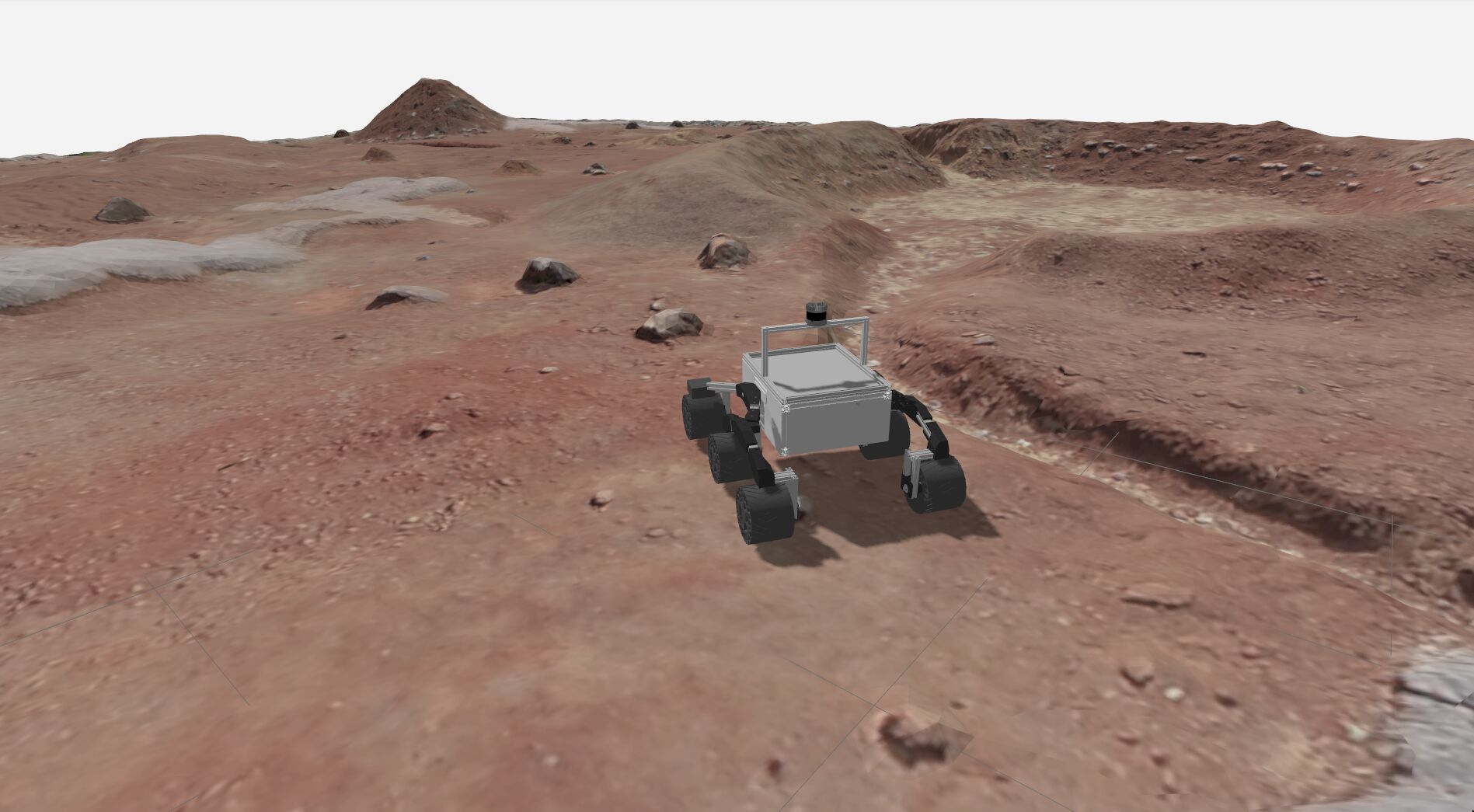
Meet Freya
Our Mars exploration rover — designed and built entirely by students at Brno University of Technology.
Freya competed at the European Rover Challenge 2025, achieving 11th place overall with standout performances in drone navigation and probing. Every subsystem is engineered from the ground up.

Chassis
Rocker-bogie suspension with 6 independently driven wheels, TPU pneumatic tires, and lightweight aluminum legs for maximum terrain adaptability.

Manipulator
5-DOF arm with differential wrist mechanism, precision gripper, and Cubemars AK series motors for sample handling and maintenance tasks.

Drilling System
Capable of drilling to 30cm depth with ESP32-controlled motor, integrated tenzometer for real-time weighing of collected samples.
Electronics
Powered by Jetson Orin Nano for AI inference, Pixhawk flight controller, and full ROS 2 architecture for modular control.
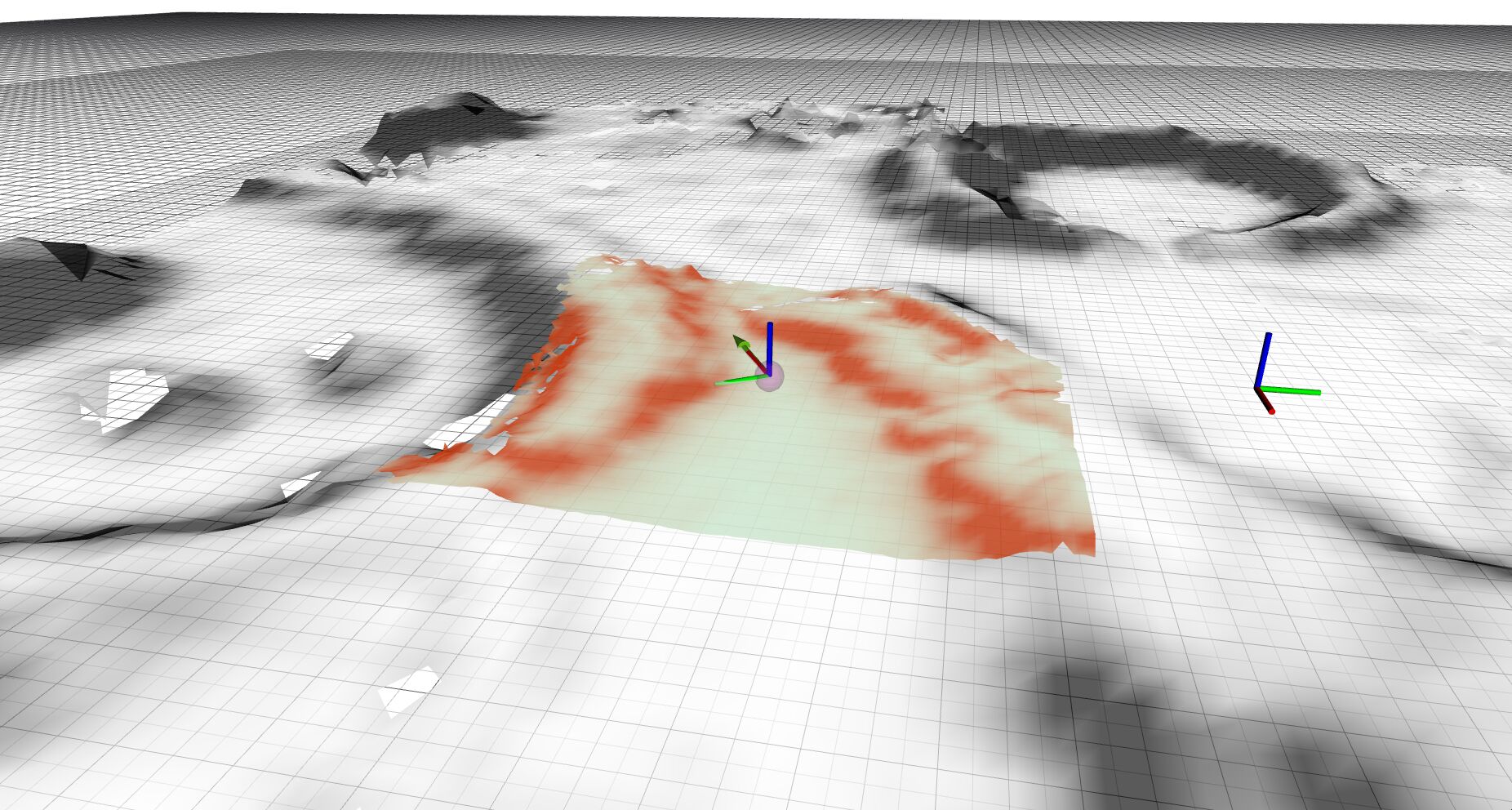
Autonomous Navigation
Visual-inertial odometry, SLAM mapping, and GPS-denied navigation using stereo cameras and 3D LiDAR point clouds.

Drone
F450-class quadcopter with autonomous landing on the rover platform, YOLO-based object detection for search and rescue missions.
Our Achievements
Competition results and recognitions.
European Rover Challenge 2025 — Krakow, Poland

European Rover Challenge 2025
11th Place Overall
Our first-ever ERC competition as the only Czech team, finishing in the top half of all international teams.

European Rover Challenge 2025
2nd Place — Drone Navigation
Outstanding autonomous drone performance with precision landing on the rover and object detection.

European Rover Challenge 2025
2nd Place — Probing
Exceptional probe collection and delivery with fast traversal and precise manipulator handling.
Awards & Recognitions
Studentský Zlatý Amper 2026
Best University Project
Rover Freya and its drone won the Studentský Zlatý Amper award for the best university project, recognized for autonomous navigation, surface and deep soil sampling, and competing at the ERC 2025 finals as the best new team among 126 international entries.
VeneToStars 2026 — Finalist
Space Agri-Food Challenge
Team BMR proposed adapting the Freya rover platform for autonomous vineyard monitoring — ground soil sampling, grape health imagery from the drone, and row navigation without GNSS. Selected as finalists for the Italian agri-food space technology challenge in Veneto.

Team BMR at ERC 2025
Days until ERC 2026
Latest Posts
Updates, stories, and technical deep dives from the team.
September 15, 2025
ERC 2025: Freya's First Visit to Krakow
A look back at our debut at the European Rover Challenge in Krakow, Poland — from months of preparation to podium finishes in two categories.
Read more →Our Team
A multidisciplinary student team from Brno University of Technology, united by the vision of exploring Mars.

Stanislav Svědiroh
Team Leader
FEKT · Coordination, procurement, motors
Stanislav Svědiroh
Team Leader
FEKT · Coordination, procurement, motors

Miloš Cihlář
Team Leader
FEKT · Weight optimization, drone, navigation
Miloš Cihlář
Team Leader
FEKT · Weight optimization, drone, navigation

Martin Majnuš
Mechanical/Science Team Lead
FEKT alumni · Design reviews, Team coordination
Martin Majnuš
Mechanical/Science Team Lead
FEKT alumni · Design reviews, Team coordination
Jan Zdebor
Mechanical Engineer
FSI · Wheels, casting, CNC, simulation
Jan Zdebor
Mechanical Engineer
FSI · Wheels, casting, CNC, simulation

Simona Petrovská
Mechanical Engineer
FSI · ANSYS, CNC, leg design
Simona Petrovská
Mechanical Engineer
FSI · ANSYS, CNC, leg design

Matyáš Klukáček
Mechanical Engineer
FSI · Wheels, motor mounting, manipulator design
Matyáš Klukáček
Mechanical Engineer
FSI · Wheels, motor mounting, manipulator design
Jan Drochýtek
Manipulator SW/HW
FEKT · Manipulator SW, URDF, inverse kinematics
Jan Drochýtek
Manipulator SW/HW
FEKT · Manipulator SW, URDF, inverse kinematics
Ondra Štafa
Drilling
FEKT · Drilling motor firmware, drill PCB
Ondra Štafa
Drilling
FEKT · Drilling motor firmware, drill PCB
Filip Šlíma
SW/Drilling
FEKT · 3D LiDAR, kiss-icp
Filip Šlíma
SW/Drilling
FEKT · 3D LiDAR, kiss-icp
Vilém Strachoň
Drilling
FEKT · PCB design, sample weighing
Vilém Strachoň
Drilling
FEKT · PCB design, sample weighing

Martin Kříž
Software/Drone
FEKT · VIO, Isaac ROS, RealSense
Martin Kříž
Software/Drone
FEKT · VIO, Isaac ROS, RealSense
David Krejčí
Software
FIT · Teleop control app
David Krejčí
Software
FIT · Teleop control app
Tomáš Horeličan
Software
FEKT · Autonomous navigation, systems engineering
Tomáš Horeličan
Software
FEKT · Autonomous navigation, systems engineering
Maksym Pleshyvtsev
Science
FEKT · Raman spectroscopy, science mission
Maksym Pleshyvtsev
Science
FEKT · Raman spectroscopy, science mission
Jakub Vacek
Science
FEKT · Liquid sample collection
Jakub Vacek
Science
FEKT · Liquid sample collection
Veronika Kubová
Marketing
FP · Social media, documentation
Veronika Kubová
Marketing
FP · Social media, documentation
Join Us
We are always looking for motivated students from any faculty. Whether you are into mechanical engineering, electronics, software, or marketing — there is a place for you.
Our Partners
We are grateful to our partners who make our mission possible.









Become a Partner
Partner with us and support the next generation of engineers building systems for Mars exploration.
Contact UsGet in Touch
Want to join the team, partner with us, or just say hello?
Discord
Join Discord
brnomarsrover@gmail.com
@brnomarsrover
Brno Mars Rover
GitHub
BrnoMarsRover
YouTube
@BrnoMarsRover
Our Lab
T12/SE 1.102
VUT Brno, Czech Republic