
Brno Mars Rover · Brno University of Technology
Building autonomous robotic systems for Mars exploration
2nd
Drone Navigation
ERC 2025
2nd
Probing
ERC 2025
11th
Overall
ERC 2025
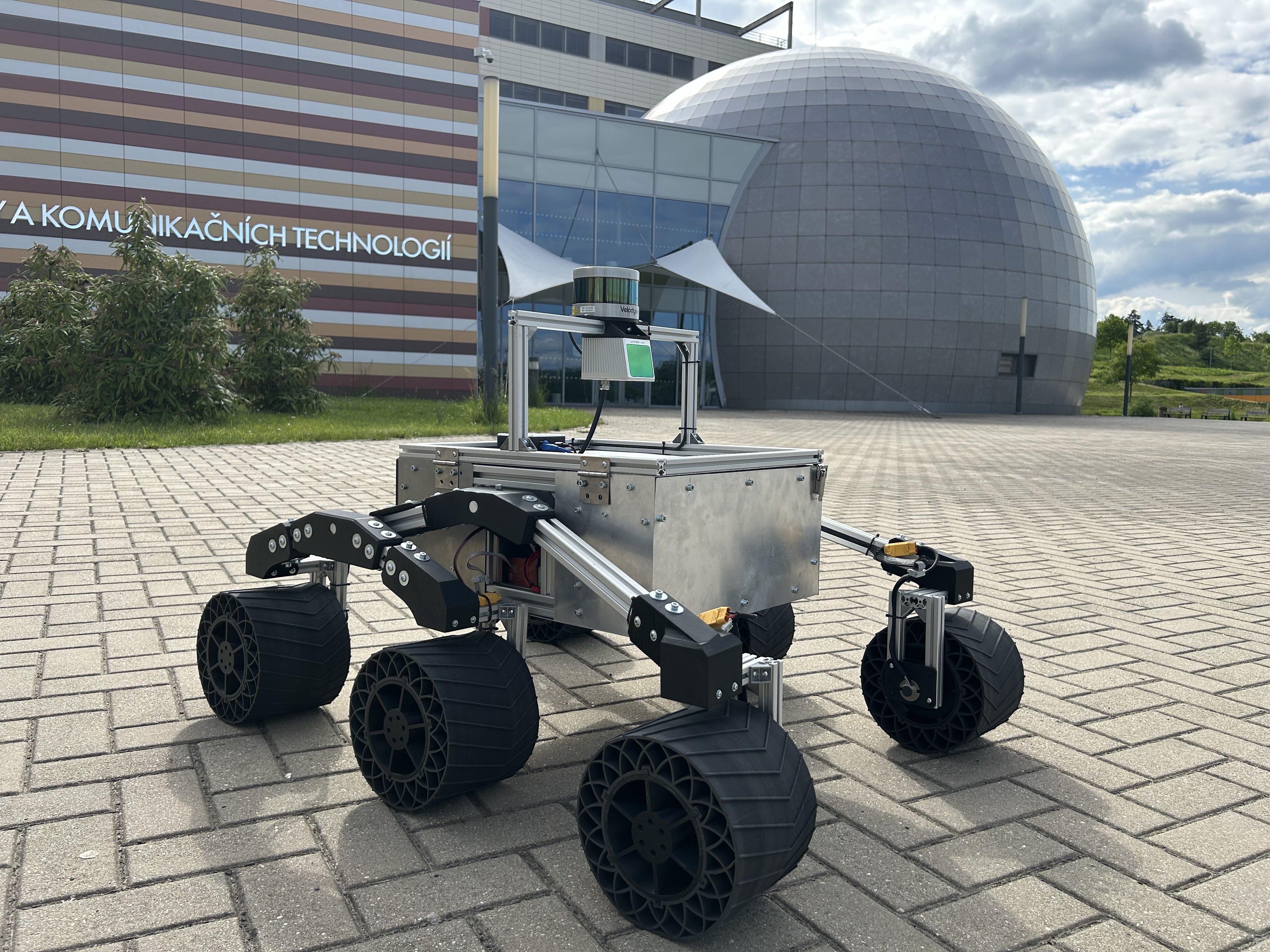
Rover Freya
An autonomous rover built for terrain exploration, object manipulation with a robotic arm, and collecting soil samples from 30 cm below the surface.
Freya is a six-wheeled exploration rover designed and built by students at Brno University of Technology. Everything from the chassis and electronics to the robotic arm and autonomy software is developed in-house.
The rover competes in prestigious international competitions such as the European Rover Challenge, where teams face challenges modelled on real Mars missions. At its first appearance in 2025, Freya finished 11th out of 25 finalists and took 2nd place in the Probing task.
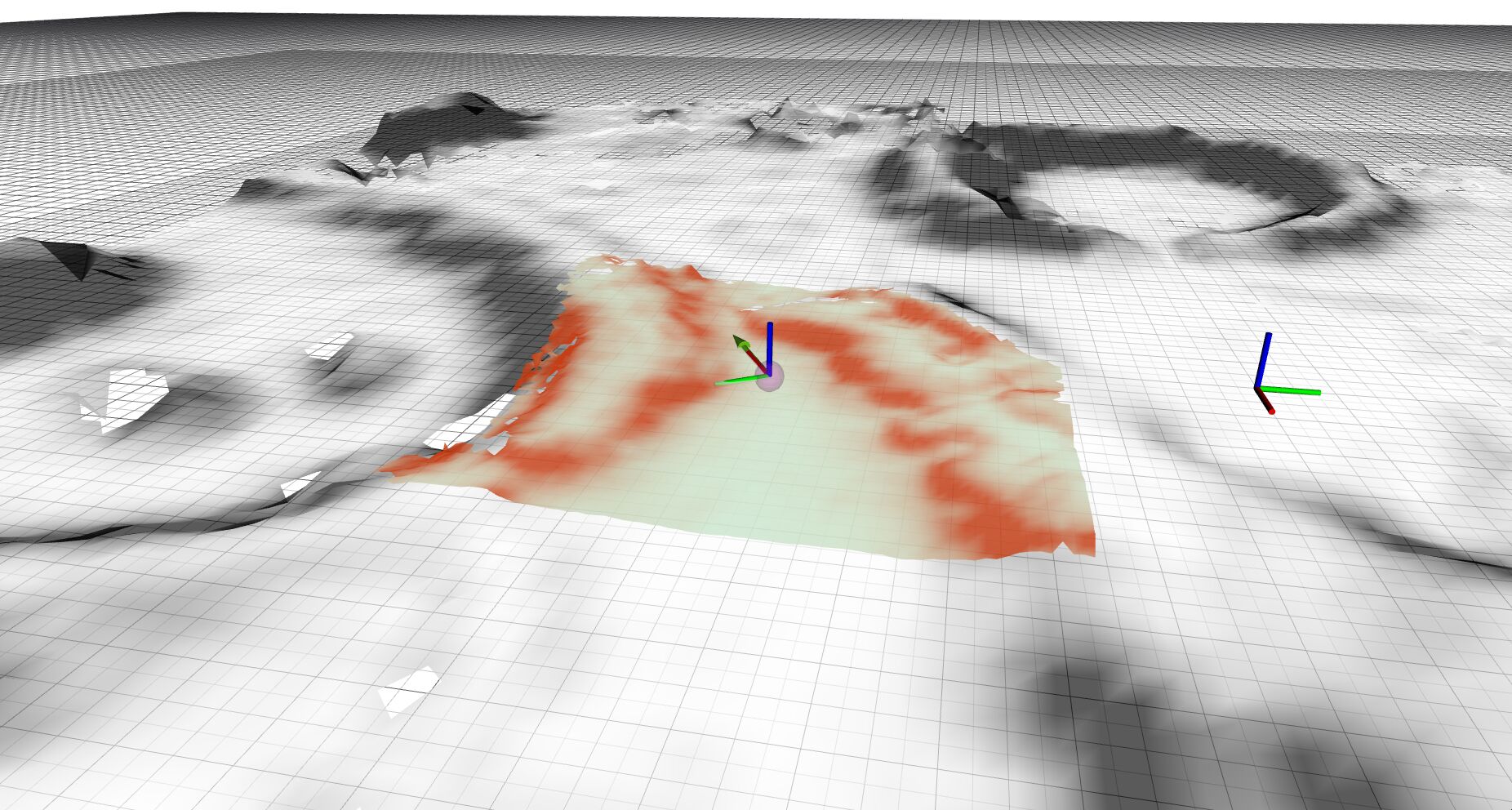
- Autonomous navigation across unknown terrain without GNSS, using onboard sensors and computer vision
- Robotic arm for operating instrument panels and precise object handling
- Onboard drill for collecting and analysing soil samples from 30 cm below the surface
- Rocker-bogie chassis with six independently driven wheels built for rough, Martian-like terrain
Capabilities




Quadcopter F450
An autonomous quadcopter built for aerial terrain search, onboard object detection, and precision landing.
The F450 is an aerial extension of the ground rover. Working in cooperation with Freya, it lets the system survey and explore far larger areas than the rover could cover alone.
The drone is built on the open Pixhawk platform running PX4 firmware and is flown in offboard mode from a Jetson companion computer, which carries the AI stack and the complete mission autonomy, from take-off to landing, all developed in-house. At the European Rover Challenge the mission is flown entirely without a pilot, and at its first appearance in 2025 the F450 took 2nd place in Drone Navigation.
- Searching the terrain for experimental probes
- Detecting and localizing objects with onboard AI
- Landing autonomously on a randomly placed marker
- PX4 autopilot with an onboard companion computer for AI inference
Capabilities




Our Achievements
Competition results and recognitions.
European Rover Challenge 2025 · Krakow, Poland



Awards & Recognitions

Team BMR at ERC 2025
Days until ERC 2026
Latest Posts
Updates, stories, and technical deep dives from the team.
June 12, 2026
ERC 2026: Will We Make It to the Finals Again?
After a successful first campaign, we are back. Our qualification video for the European Rover Challenge 2026 is out.
Read more →Our Team
Founded in 2023 at the Faculty of Electrical Engineering and Communication, we bring together bachelor's, master's, and PhD students from across the university, united by the vision of exploring Mars.

Stanislav Svědiroh
Team & Electronics Leader
FEKT · Coordination, secretary, chassis, manipulator
Stanislav Svědiroh
Team & Electronics Leader
FEKT · Coordination, secretary, chassis, manipulator

Miloš Cihlář
Team, Software & Drone Leader
FEKT · Software, drone, manipulator
Miloš Cihlář
Team, Software & Drone Leader
FEKT · Software, drone, manipulator

Martin Majnuš
Chassis & Manipulator Team Leader
FEKT alumni · Chassis, manipulator
Martin Majnuš
Chassis & Manipulator Team Leader
FEKT alumni · Chassis, manipulator

Simona Petrovská
Chassis & Manipulator
FSI · CNC, ANSYS
Simona Petrovská
Chassis & Manipulator
FSI · CNC, ANSYS

Matyáš Klukáček
Chassis & Manipulator
FSI · Wheels
Matyáš Klukáček
Chassis & Manipulator
FSI · Wheels

Jan Drochýtek
Manipulator
FEKT · Software
Jan Drochýtek
Manipulator
FEKT · Software
Ondřej Štafa
Drill
FEKT · Software, PCB
Ondřej Štafa
Drill
FEKT · Software, PCB

Filip Šlíma
Drill & Drone
FEKT · Software
Filip Šlíma
Drill & Drone
FEKT · Software
Vilém Strachoň
Drill
FEKT · Sample weighing
Vilém Strachoň
Drill
FEKT · Sample weighing

Martin Kříž
Drone & Software
FEKT · Drill, VIO
Martin Kříž
Drone & Software
FEKT · Drill, VIO

David Krejčí
Software
FIT · Teleop control
David Krejčí
Software
FIT · Teleop control

Jakub Vacek
Science
FEKT · Liquid sample
Jakub Vacek
Science
FEKT · Liquid sample
Join Us
We are always looking for motivated students from any faculty. Whether you are into mechanical engineering, electronics, software, or marketing, there is a place for you.
Our Partners
We are grateful to our partners who make our mission possible.









Become a Partner
Partner with us and support the next generation of engineers building autonomous robotic systems for Mars exploration.
Contact UsGet in Touch
Want to join the team, partner with us, or just say hello?
Discord
Join Discord
brnomarsrover@gmail.com
@brnomarsrover
Brno Mars Rover
GitHub
BrnoMarsRover
YouTube
@BrnoMarsRover
Our Lab
T12/SE 1.102
VUT Brno, Czech Republic